camvo
0
- Joined
- Sep 25, 2011
- Messages
- 102
- Points
- 0
OK Bionic-Badger.
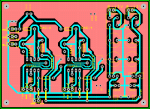
I will modify the current board to connect it to the DUE.
It means I will cut off the BOARDUINO part.
When it is finished, I will post it on this thread.
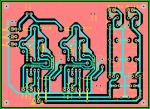
I will modify the current board to connect it to the DUE.
It means I will cut off the BOARDUINO part.
When it is finished, I will post it on this thread.



")